
Hi everyone.
I have a plan to make a Honda super cub electric conversion.
Due to Japanese motorcycle regulation, I am looking forward to 1000W rated motor, and I found Unite's 1000W scooter type motor is popular and reasonable.
However, information from official website is limited. So,I would like to ask you about the motor in detail such as;
1)How much the max power at rated voltage? Performance chart would be appreciated if possible.
2)How differ 36V, 48V and 60V version in construction and actual performance?
3)If applying higher voltage than rated voltage is recommended or not?
Or, any other better motor rated 1000W ?
I want to maximize the vehicle performance in limited power. Any idea or suggestion would be appreciated.
Thank you.


I post again since there is no reply(^^;
I have searched further shop and found Currie scooter motor seems better(smaller,earth magnet equipped and expensive).
But, 1000W version is no more available,why not!
So, now I am watching Currie 900W, but information is also limited.
Do you have any suggestion?
Thanks.
hi there i have two motor witch i use both to test,1 is a unite 750w 36v blue motor rated at 2800 rpm,and a my1020 1000w 36v black motor rated at 3000rpm,my question is the following,why is my bike slower whit the 1000w motor ?is dose have more toque but its slower on top end even if it stats 200 more rpm than the 750w motor...
i used the same gear and state of charge,
thanks,..
Cheetah
Planned Obsolecence
<<< EXTREME WARNING >>>
Unite motors are built with commutators that have underperforming "glue". They have a sort of built in self destruction over a certain period of wear and tear. When you try to increase power all that happens is that it shortens the time until you get commutator failure. There is no remedy. (I've destroyed six Unite motors in total) The best I was able to get while at full power was about 1000 miles of riding.
------------------------
The better choice is to get these:
http://shop.ebay.com/motor-generator04/m.html?_nkw=&_armrs=1&_from=&_ipg=25
...they are built well, the commutators don't break, and they use higher powered neodymium magnets.
And they are cheap.
Forget Unite... you will save yourself a HUGE amount of frustration.
Hi safe, Thank you so much for your advice.
I have already made a e-bike with the motor. I found it is heated too much (with smoke coming out some time) that seems to be failed soon.
So your point is really understandable.
Thanks too for better choice.
These motor seems like one for Currie scooter that I could not find available 1000W type in EV parts shop.
I wonder if I can apply 50V (my battery's voltage) for these 36V motor?
Anyway, it seems much better.
Thank you.
Hi Cheetah,
The 750W motor and 1000W motor is same in size and weight, isn't it?
My question is what in the motor does differ the performance.
I guess these may be really same thing with different ravel.(^^;
Neodymium magnets create more magnetic flux for a given magnet volume. (they are stronger magnets) This allowed the use of a different copper winding pattern that reduces electrical resistance and that reduces heat.
I've been running mine (the 1.4 hp version) at 52 volts and a controller current limit of 20 amps. So far I have 1000+ miles on this motor and no problems at all.
However...
I have modified the motor slightly by drilling holes on the sides to let the air circulate better. This is a common practice with these small motors and does tend to reduce overheating problems. Be careful not to damage the functionality of the motor when you drill. (you must take it apart and know how to put it back together without damaging the brushes)
Be careful about going much beyond 20 amps for the controller. My guess is that if you went to 40 amps it would probably overheat.
I run mine flat out, wide open and it never overheats.
(it's so much better than the Unite motor... the image is of a failed Unite commutator)
The story on the superior motor is that Currie wanted to make them as an improved product, but in a sense it was "too strong" to replace the stock motor. Kids were installing these motors on their scooters and falling off from the extra torque. Since the laws in America tend to limit scooters to 750 watts (1 hp) these Neodymium 1.4 hp motors had too much power and so Currie decided not to sell them for liability reasons.
This guy in New York bought the ENTIRE stock of these motors and has been selling them off slowly... making a nice little profit along the way.
I wonder how many he still has left...
Thanks for the interesting story and your advice.
I am grad to know your motor runs at 52V in safe. But 20A seems too little for max current as I put more than 40A to my Unite motor which is required to drive my bike. Or 20A is enough for the high efficient neodymium motor?
"1.4hp(1kW)" of your motor means rated power not maximum power? I want more power than my Unite motors rated 1kW.
As for cooling hole, I can try but it should not good for driving in the rain. I prefer cooling fin attached to the Currie's "too strong motor"...
Thank you.
I'm using 20A because 20A * 50V = 1000 watts input.
...which means:
1000 watts * 75% = 750 watts output. (1 hp)
My bike is a testbed for an Electric Bicycle Road Racing concept where all the bikes would be limited to 1000 watts input as a way to make racing fair.
It's very possible that the motor can handle 40A.
Doing the math:
40A * 50V = 2000 watts input.
...now we subtract losses:
2000 watts * 75% = 1500 watts output. (2 hp)
------------------------
That's more than the 1.4 hp that the motor is designed for and so you might get a lot of heat and stress on the motor. Using less current keeps the motor cooler and makes it run more efficiently, but creates less torque.
Try it... if it gets too hot try a 30A controller.
------------------------
Also, you need to be sure you can handle the rpms that this motor with this voltage creates.
The motor runs at 120 rpm per volt. (from my testing)
So if you are using 50v * 120 rpm/v = 6000 rpm maximum.
The "best" power occurs at about 5000 rpm. (highest efficiency)
So it's VERY important to gear the motor down radically to get the motor rpm higher. My gearing uses 7 speeds with a derailler and first gear STARTS at a ratio of 17 to 1 geardown.
Direct chain drive would be very difficult... you need a geardown to make it work correctly.
Are you planning a geardown unit of any kind?
Specification of my Unite motor is;
48V*26.7A=1286.4W @ 3000rpm(more than 78% of efficiency)
Although I do not know the spec. of your motor, it seems not much better than mine at least in calculation.
6000rpm maximum is higher than I expected (my motors max is 3700rpm). So I have to change my gearing totally as it is single gear down ratio of 5.75 so far.
For your information, my bike weigh 65kg in total and the top speed is about 50km/h on flat road. I feel the gear ratio should be lower(means high rpm at same vehicle speed) to use more efficient rpm.
I think multi speed transmission is good for both efficient and performance. But a bicycle type derailler system is too complicated and too big to install to my bike. I wonder if there is simpler transmission system as I thing 2 speed is enough.
I'm using a geardown unit that I took from another Currie type motor. It didn't fit naturally and I had to do a lot of work to force the motor parts to fit together. It has a 9 : 60 gear ratio that produces a 6.6 to 1 net ratio.
There are go kart sprockets that go as high as 114 teeth and if you used a 11 tooth front sprocket your ratio would be about 10 to 1 net ratio.
http://www.jackssmallengines.com/gokaz_splitracingsprckt.cfm
...that would probably be your easiest thing to do.
Some guys have ordered special sprockets with really high tooth counts to lower the gear ratio.
----------------------
Geardowns are a big problem with all these ebikes... and no one has a perfect solution.
Thank you for useful information as usual. The go kart sprockets are affordable and variable.
But I wonder if #25mm chain installed to the Currie type motor is enough durable as it looks so small and thin.
Even 8mm chain used for my Unite motor is easy to be stretched.
Year, gear down is a big problem. I am using 63 teeth driven sprocket which center hole is bored by my friends factory to install to my bike. But I found speed reduction is not enough. So, I am buying 10 teeth drive sprocket in stead of normal 11 teeth.
If I would use the above go kart sprockets for Currie type motor, I have to modify it to install to my bike too.
11:63 or even 10:63 is still way too high.
You need something more like 11:114 to handle 6000 rpm.
----------------------------
I've used #25 chains and they don't break, but after a few thousand miles they wear out.
However...
Go Kart chains are #35 chains !!!
They are designed for 10 hp Go Kart motors and so they are plenty strong for your bike.
Buy the Go Kart sprockets and chain and you should be fine.
10:63 is roughly 40% too high and will only produce a result that lacks peak power and has low efficiency and high heat. 10:63 will not work. (is it too late to return the new sprocket?)
By my calculations if you use 10:63 you will only achieve peak efficiency at 65 mph !!!
(so basically NEVER)
--------------------------------
11:114 should give you:
Maximum (no load) speed: 43 mph
Peak Efficiency speed: 40 mph (250 watts heat)
Peak Power (assumes 40A) speed: 40 mph (250 watts heat)
Low End Torque: At speeds below 10 mph as high as 1000 watts heat !!!
...which in my opinion is still very, very high.
My motor normally operates in the high efficiency area most of the time and with only 20 amps and seven gears, so I average about 150 watts of heat continuously.
Sorry for confusing you, but "11(or 10) : 63" is just talking about my Unite motor which max speed is 3700rpm. I intend to use the motor for a while.
As for Currie type motor, rpm is almost double. So, your point is right.
Radius of my tire is 275mm and I need 50km/h(31mph) for top vehicle speed on flat road. I think it may be around peak efficiency(=5000rpm) and peak power speed is little less.
So, 50km/h @ 5000rpm---> gear ratio "R" should be...
275*2*3.14mm * 5000rpm * 60min * R = 50*1000*1000mm
R=0.0965 ... sprocket combination is 11:114.
Same gear ratio but lower speed... is it still too high?
Now wait... are you using 36 volts or 48 volts?
For the 1000 Watt Unite Motor:
36 Volts with 10:63 :
Maximum Rpm: 3700 (45 mph)
Peak Efficiency Rpm: 3300 (41 mph)
Peak Power Rpm: 3200 (36 mph)
48 Volts with 10:63 :
Maximum Rpm: 4900 (60 mph)
Peak Efficiency Rpm: 4400 (55 mph)
Peak Power Rpm: 4200 (51 mph)
------------------------
The 1000 watt Unite has a "kv" (that's a constant that people use to evaluate electric motors) of roughly 102 rpm / volt.
The 1.4 hp Currie motor has a "kv" of roughly 121 rpm / volt.
This means that whatever voltage you use will produce a higher rpm with the Currie compared to the Unite.
Unite motor:
48 Volts with 11:114 :
Maximum Rpm: 4900 (37 mph)
Peak Efficiency Rpm: 4400 (33 mph)
Peak Power Rpm: 4200 (31 mph)
Currie motor:
48 Volts with 11:114 :
Maximum Rpm: 5800 (43 mph)
Peak Efficiency Rpm: 5200 (39 mph)
Peak Power Rpm: 4800 (37 mph)
---------------------------
"Gear Ratio" = 11 / 114 = 0.096
kv * voltage = Rpm
Rpm * "Gear Ratio" * 0.0774 (depends on wheel size) = Mph
(48 * 121) * 0.096 * 0.0774 = 43 mph
---------------------------
You should create a spreadsheet with all the formulas and play around with voltage and gearing. Maximum efficiency tends to end up at about 90% of maximum rpm and peak power usually ends up at about 80%.
---------------------------
Just to give you an idea of how my gearing is set up here is the gear-to-speeds for my older bike with the Currie motor:
1st - Peak Efficiency(25 mph), Maximum(27 mph)
2nd - Peak Efficiency(29 mph), Maximum(31 mph)
3rd - Peak Efficiency(32 mph), Maximum(35 mph)
4th - Peak Efficiency(37 mph), Maximum(40 mph)
5th - Peak Efficiency(44 mph), Maximum(47 mph)
6th - Peak Efficiency(50 mph), Maximum(54 mph)
7th - Peak Efficiency(57 mph), Maximum(62 mph)
...I rarely need more than 1st, 2nd, and 3rd gear.
(only use the higher gears downhill)
Flat land speed is 35 mph.
Best downhill speed is 58 mph.
Average speed (over 10 miles) is roughly 30 mph.
----------------------------
What is the bottom line?
In some cases more voltage actually makes things WORSE. This is because it pushes the peak efficiency rpm up too high to be usable and that forces the motor to produce a lot of heat. You have a tradeoff between voltage and rpm. More voltage can produce more power, but it comes at the price of more rpm.
The current you allow is another variable. Sometimes using a lower voltage and a higher current limit will create a wider and more usable powerband with less heat overall.
The best configuration uses the highest voltage possible with the lowest current limit possible and lot's of gears so that you can go from peak to peak. The best example of "how to do it right" is the Optibike.
http://www.optibike.com
I am using 48V(51-52V actually) battery. And my Unite motor is 48V type that is not a same thing as 36V type.
Following is the spec sheet of the motor from Unite web sight (not exist now).
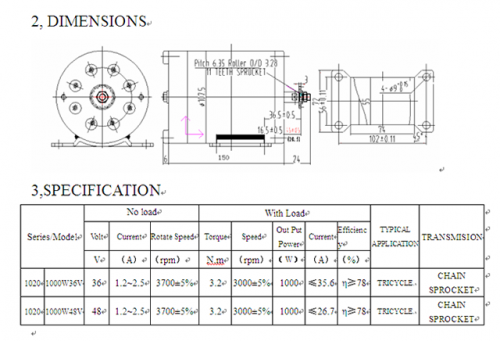
The no load rpm(3700) and with load rpm(3000) are same on different voltage. So, KV is not same of course.
From that data, I have calculated the performance of my bike as follows.(under 48V, 40A current limitation)
Now by using 11:63 sprocket, max speed on a flat road is just under 3000rpm that is around peak efficient I think.
Then, by using 10:63 sprocket, I will be able to use 3000rpm just before max bike speed.
"What is the bottom line?
Your point is fine. But, I can not understand what does "the highest voltage possible with the lowest current limit possible" mean.
High voltage can create high current that creates high toque. So, if you limit current at low level, that make no sense...
Your point is "use a motor at high revolution at low torque"?
77 rpm / volt
Okay, you have the 48 volt version, not the 36 volt version of the Unite motor. That has a 77 rpm / volt kv and that means all the gearing numbers are lower.
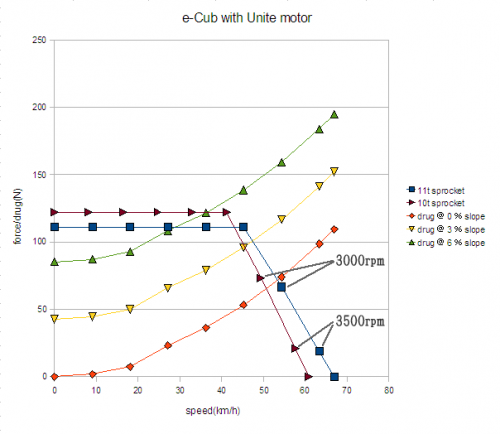
This is what your motor looks like charted:
...notice the magenta colored line, that's the "Rated Heat" and it's the value that the motor can handle forever without overheating. If you use more low end power the heat is ABOVE the rating and that's what overheats the motor.
The "goal" is to always keep the heat below the "rated heat".
For this motor:
10:63 --> Peak 32 mph, Max 45 mph
11:114 --> Peak 20 mph, Max 27 mph
12:114 --> Peak 22 mph, Max 30 mph
13:114 --> Peak 23 mph, Max 32 mph
14:114 --> Peak 25 mph, Max 35 mph
...I'd guess the 14:114 would be the best. 10:63 is still going to be very high for uphill.
--------------------------
The other question is about overvolting. This is the same motor using a higher voltage and a corresponding lower current limit of 26.66A verses 40A:
You can see that not only is the power slightly better at peak, but the heat is MUCH lower. Higher voltage means more rpms which means a lower gearing, but otherwise it's better to use more volts and less amps. (better overall efficiency)
At 72 volts your gearing would be:
11:114 --> Peak 36 mph, Max 41 mph
Which is a little high, but slightly better than what you have now. The higher voltage will tend to run cooler, so it might work.
--------------------------
Notice how as you increase voltage and decrease current the high effficiency rpm tends to get CLOSER to the peak rpm. That's a good thing... generally it's best when they are the same. The wider the gap between peak power and efficient power the less optimal the setup.
Carefully study the RED heat lines in the chart... that's the secret to getting a motor to work at it's best.
---------------------------
Note: I actually tried the 36V Unite 1000W motor with 72 volts and it was insanely powerful. I pulled 50 mph on the flat without any problem as I used a 40A controller. But you can guess what happened... all that power and heat destroyed the motor. Fun while it lasted, but not reliable.
72 volts combined with a low gearing and a VERY LOW current limit of 30A or even 20A would produce a nice result. It's actually the current that destroys these Unite motors because it can't handle so much going through the commutators. Keep in mind that no matter what you do Unite commutators do not last long.
The 1.4hp Currie motor has been more reliable.
I'd buy the 114 tooth rear sprocket and get a 11 and 14 tooth front sprocket and see how it goes on your existing setup. Then when the Unite dies (which it will) you have an easier upgrade path.
The Dream Setup
How might the "optimal" setup look like?
First we want to get the motor to a configuration where you attain that match between peak power and peak efficiency. You do that by increasing voltage while decreasing current until the two target points come into focus.
We can do this with:
72 volts and 20 amps
The motor chart will look like this:
...notice that the HEAT is so low that you are below the motors heat rating even at very low rpms. This means that most of the time while riding the motor is running cooler than it needs to be and that allows those hard low end torque situations now and again that do produce excess heat. Peak power is reasonable at near 1200 watts. (1.6 hp)
Next we need a controller...
How about:
http://www.newkellycontroller.com/kds72050e50a24v-p-760.html
KDS72050E,50A,24V-72V - $119.00
Kelly controllers are programmable and since this one can be used from 24V-72V you can use it any way you want. You get what you pay for with this controller. You can set the controllers current limit to anywhere from 20A to 50A.
Total flexibility!
Now to the gearing.
11:114
Peak Power 38 mph
Peak Efficiency 38 mph
Maximum 41 mph
...everything above 20 mph is BELOW the heat rating.
I know from experience that only on steep hills do you have to drop below 25 mph. So this means that you get cool high efficiency power across a wide range of speeds.
Thank you for great chart! Now, I am understanding your point, but still have some questions.
1) Why the heat is higher at lower rpm?
2) How did you calculate the rated heat?
3) Do you limit the current by controller?
I am using Kelly 48050E controller that is programmable as you mentioned.
But, ones I set the current limit the motor suddenly stops when it goes to over current.
Any way, I do not have 72V battery, 11:114 ratio seems available only by 2 step reduction.
So, I am going to use 52V battery and 10:63 ratio so far.
I will try 2 step reduction when I get Currie type motor in the future.
1) Why the heat is higher at lower rpm?
Heat = ( Current * Current ) / Resistance
Electric motors also create a "backEMF" as they spin faster and faster. When the motor approaches it's maximum "No Load" speed the equation becomes:
Battery Voltage = BackEMF Voltage
(this means it can't go any faster because the opposing force equals the driving force)
Remember V = IR ? Voltage = Current (I) * Resistance
When there is no opposing "backEMF" the current can go very high. This is why at low rpm (when "backEMF" is low) the current goes high and since heat is connected to current the motor gets hot.
2) How did you calculate the rated heat?
This one is easy. Take the "rated load" rpm and then look up how much heat it has. If you have the formula's for the motor you can figure this out.
3) Do you limit the current by controller?
Yes, the controller uses something called "Pulse Width Modulation" to chop the battery energy into little slices and that slows the current down to something more manageable. You Kelly programmable controller should have a setting for current. They can sometimes have more than one setting with one for peak battery current (battery current limiting) and another for motor side current (armature current limiting) and also an extra setting for those that want to go above the limits for some time period. There's a lot to fiddle with.
----------------------------
I know you don't have a 72 volt battery, but I just wanted to show how you could do it in an ideal way. You could buy those Go Kart sprockets and get 11:114 if you want. It's not necessary to use a geardown unit.
But just go ahead and try things as you have them and see what happens. If the motor gets hot then you ought to think about making changes in either the gearing or the current limit or both.
The setup you have now will be "okay", but not "ideal".
Motor formula's for a motor:
Current = Voltage / Resistance
Heat = (Current * Current) / Resistance
Voltage = Battery Voltage - BackEMF Voltage
BackEMF Voltage = Motor Rpm / kv (which is RPM per Volt)
...now the "Pulse Width Modulation" formula gets a little complicated for the controller so you're better off assuming that the current is constant. With a little effort you should be able to set up a spreadsheet with rpm going from 0 to the maximum rpm and then fill out all the cells with these formulas.
It took me 6 months to completely understand all the forumla's but you should be able to play around with the simpler formula's and get something.
The simpler formula's produce a straight line on the left for power.
Or you can just take my word for it...
1) Why the heat is higher at lower rpm?
Generally speaking, motor current is higher at lower rpm because of "backEMF"("self generated power" I think) as you mentioned.
In this case, however, the current is limited/constant until certain rpm.
So, if heat = I^2/R, heat should be constant at lower rpm as resistance is constant, isn't it?
2) How did you calculate the rated heat?
So, "with load"="rated road" means heat is acceptable for ever generally. I have got it.
3) Do you limit the current by controller?
I will check out by trying some controller setting compared with the current meter which I have just installed.
Thank you.
So, if heat = I^2/R, heat should be constant at lower rpm as resistance is constant, isn't it?
For the most part yes, however, there is a weird thing that the "Pulse Width Modulation" does in harmony with the motor. If you know about gasoline engines they sometimes use a "tuned exhaust" like a "header". The header allows better fuel flow that you would normaly expect because the "resonance frequency" of the exhaust helps to increase the flow. The same idea works with electric motors and with "Pulse Width Modulation" in that a lot more current is allowed to flow than you expect for a simple current limit. Some call this "Current Multiplication" in that you are able to flow a lot more current than expected.
However, some controllers correct for the extra flow. This corrected measurement is called "Armature Current Limiting" and it means it strictly limits the motors current which then strictly limits heat.
Current is heat... that's the central idea.
------------------------------
I've built a little spreadsheet with the simple versions of the formula's.
Data starts on row 8:
Column A : Rpm : From 0 to 3700 I spaced 100 per row
Column B : Voltage : MIN($Voltage-C8,$Current*$Resistance)
Column C : BackEMF : A8/$Kv
Column D : Current : B8/$Resistance
Column E : Heat : (D8*D8)*$Resistance
Column F : Power(In) : $Voltage*D8
Column G : Power(Out) : ((B8+C8)-(D8*$Resistance))*(D8-$NoLoad)
Column H : Efficiency : G8/F8
Constants are:
$NoLoad : 2.25
$Resistance : 0.337
$Voltage : 48
$Kv : 78
$Current : 40
...if you create a spreadsheet with these formulas you can then plot the graph yourself. It's not the "true" adjusted graph, but it's close enough.
--------------------------
In order to actually solve the "true" formula you need to be able to use a Quadratic Equation. If you've taken enough math classes you know what that is.
Be careful about using the heat values of this simple formula, the real heat can be several times higher than the simple formula's reveal. (it's really bad at low rpm)
I've actually seen this formally proven for electric motors, and also did "discover" it on my own. When you try to solve for the controller with it's "Pulse Width Modulation" it forces you to use a Quadratic equation to arrive at the result.
Fortunately you can just "copy paste" and get there.
Replace the formula in Column B row 8 with:
=MIN(((C8)+(SQRT(C8^2+4*($Voltage)*($Current*$Resistance))))/(2*$Voltage),1)*$Voltage-C8
...then fill down.
Now you have an accurate, controller adjusted, current limited, motor performance profile that includes the heat at each motor rpm.
You now are the master of the universe and can get a big ego !!! (kidding)
----------------------
Note: Minor correction...
Column F : Power(in) : $Voltage*D8
...should be:
Column F : Power(in) : (B8+C8)*D8
Building A Motor Spreadsheet
Data starts on row 8:
Column A : Rpm : From 0 to 3700 I spaced 100 per row
Column B : Voltage : MIN(((C8)+(SQRT(C8^2+4*($Voltage)*($Current*$Resistance))))/(2*$Voltage),1)*$Voltage-C8
Column C : BackEMF : A8/$Kv
Column D : Current : B8/$Resistance
Column E : Heat : (D8*D8)*$Resistance
Column F : Power(In) : (B8+C8)*D8
Column G : Power(Out) : ((B8+C8)-(D8*$Resistance))*(D8-$NoLoad)
Column H : Efficiency : G8/F8
Constants are:
$NoLoad : 2.25
$Resistance : 0.337
$Voltage : 48
$Kv : 78
$Current : 40
...if you create a spreadsheet with these formulas you can then plot the graph yourself:
Oh, great math formulas! But before I understand why these are like this, I have fundamental question.
"Pulse Width Modulation"(PWM) for DC motor is to create variable voltage by varying ON time in high frequent wave of current.
Do you mean current limitation can not work correctly, so the current at low rpm is much higher than the limitation target?
But any way I can not understand why the current varies so much like your chart.
By the way, I tested my bike with DC current meter on board. I found the current is about 30A at low speed(under 20-30km/h).
But it increase to 45A at high speed (over 35km/h) in spite that I set 35A for max current to my controller.
I wonder what is going on.
If you want to understand "Pulse Width Modulation" (PWM) you should go here:
http://en.wikipedia.org/wiki/Buck_converter
Ignore the "Continuous vs Discontinous" stuff as it does not apply to the higher power levels we deal with for controllers. (you are always in Continuous mode)
--------------------------------
What is going on?
You have a "Battery Current Limit" of 35A, but you measure 45A going to the motor... why?
Well, this is the "Current Multiplication" idea I was referring to earlier. What happens is this formula takes place:
Motor Voltage * Motor Current = Battery Voltage * Controller Limit
So let's say:
Motor Voltage * 45A = 48V * 35A
Motor Voltage = ( 48V * 35A ) / 45A
Motor Voltage = 37.3V
Duty Cycle
There is a concept which is called "Duty Cycle" and it's a percentage that represents the amount of "on time" the pulses are modulating.
Throttle off = 0% "Duty Cycle"
Throttle on = 100% "Duty Cycle"
...however, that's only when there is NO LOAD on the motor. Whenever there is a load on the motor the controllers job is to adjust the "Duty Cycle" downward so that the current released matches the controller limit setting. "Pulldown circuit" is a the way you might describe the process of limiting the current. The controller is simply taking the throttle out of your control and making it more closed than you think it is by electric means.
Doing the math:
37.3V / 48V = 78% "Duty Cycle"
--------------------------
The bottom line is that there is a disconnect between the voltage and the current from the two sides of the controller.
Trust me... these are NOT easy ideas to understand. The cause is something even more bizarre which is electrical Inductance. Inductance is the "spring like" behavioral qualities of any electical circuit. Electric motors act like very big springs and when you bounce the PWM through them they oscillate in harmony. Inductance is a whole other side to motors. The trend seems to be to lower and lower inductance motors for higher performance, but that puts more strain on the controllers. So it's complicated.
Inductance and Resistance are closely related.
Hope that answers things somewhat...
------------------------------
Some history.
Long, long ago people tried to use resistors as controllers of voltage for electric vehicles. The problem with that idea is that the resistance wasted energy as heat. Modern controllers using PWM are 95% efficient in converting a higher voltage to a lower one... but you get the weirdness of the "Current Multiplication" in the process.
-----------------------------
Just remember that current is heat.
Study the red line for Heat on the spreadsheet graphs. When you understand how heat gets created you can design to minimize it. Low rpm has a lot more heat than high rpm when under full load, but no load conditions have low heat across all rpms.
You can have high efficiency if you are going at half maximum rpm and using half throttle because the curves all change when you are trying to conserve. People who are obsessed with saving energy sometimes "throttle fiddle" while watching their current and wattage meters and manage to reduce current as much as they can that way. (manual control of heat)
The graphs are for "full throttle" performance, much like you would use with a dyno on a car motor.
Thanks for starting this thread. I've read it through a few times and have even started to absorb a little (I think). I built a spreadsheet with Safe's formulae, and get a graph that looks just like the ones above. I do have a couple questions about the "Constants":
$NoLoad you are using a factor of 2.25. What does that number mean and how can I know what value I should use for my specific motor?
$Resistance Is this supposed to represent the internal resistance of the motor? From motor terminal to motor terminal? Expressed as ohms? I've tried a few times to measure the resistance in some Currie motors with a DMM. Never felt like the results were very accurate or reliable. Got any tricks to measure a motors resistance?
I have one of those e-bay 1.4HP Currie motors. Haven't even run it yet. They have no rating label, so all I had/have to go on is the listing on e-bay. According to that, 3400RPM at 36V. That seems to conflict with what you have found in testing. Just curious, what method did you use to develop your RPM/V ? That's the first thing I was going to do when I hooked up my motor. Thought about using multiple voltage sources and measuring and plotting the RPM's. Probably close enough. May also try the spin-with-a-drill method, too, just to see how close they come to each other. Regardless, I'm in the market for a good tach. Any recommendations?
$NoLoad is a constant that engineers discovered a long time ago. When the motor is spinning at it's maximum speed (it's the no load speed because there is no load on the motor while measuring) this represents the current that is needed to cover the "overhead" of losses the motor creates. The lower the "No Load" current the better. The stroke of luck that the engineers found was that if you can know this single data point you can linearly extrapolate backwards how the motor will perform everywhere else.
The short answer is $NoLoad is the no load current value.
$Resistance is the motor resistance. In theory you should be able to measure it, but usually there is more than one path that the current flows through so you need to adjust for that. Typical Unite and Currie motors activate two paths at once. The best "trick" to knowing resistance is to use the motor on a vehicle and match mph with rpm. You then work backwards to get everything in alignment.
The 1.4hp Currie Neodymium motor is nice, the best motor of that type I've owned and much better than the Unite. They tend to list "Rated Rpm" which is different than "no load speed". "Rated Rpm" is a completely arbitrary concept where the motor builders test their motors to see how well they handle heat and decide on how much load they can handle. It's the "heat break even" point that defines the "Rated Rpm". If you modify the motor by drilling holes you can effectively change it's rating... in the abstract anyway.
I'm pretty sure the Kv is 121 rpm/volt for that motor. I've been using it for a few thousand miles and the data all seems spot on for that number. I'd guess it could be off by a few percent, but not a lot.
This is how they typically present motor data:
...you can see how they isolate "Rated Load" verses "No Load". (in this case "Rated Load" is being called "With Load")
I used 2.25A for the No Load because they tend to be overly optimisitic with these numbers. (1.2A-2.5A) Always assume things are less than the ideal.
Thanks for the explanations. When this sinks in better, I'll probably have more questions than I do now...
I don't doubt your claim of 121 RPM/V. I was just thinking (hoping) these would be slower-running motors. I bought two before he raised his price. I was looking for the most powerful Currie-type that could easily accept a 15T freewheel so I could run each separately, or both together in series or parallel. Also wanted to experiment with different voltages on the fly. For this 1.4Hp motor, I was thinking of starting with 24V,36V,48V selections (With 4 12V SLA's, I can tap-off a negative in three places and wire thru two six-terminal solenoids to change voltage while riding). I'll need a controller that can handle multiple voltages. Seems like I should strongly consider a programmable amp-limiting controller? What else is out there besides Kelly?
Do you know if any motor data exists for Currie motors? (like what you have above for the Unite)
Thanks again for your explanations.
Long way to the master of motor control....
Inductance is like a dumper(shock absorber) rather than spring.
Inductance"L" makes minus voltage"e" calculated from:
e = -L*di/dt
I found explanation for PWM like this(sorry in Japanese) though it is little different from Wikipedia's.
http://www15.ocn.ne.jp/~imai/junk/pwm/pwm.html
According to the page, average current"I" is;
I = (s*Ve - Vw)/R (fig 3-2)
s:duty, Ve: battery voltage, Vw: inductance voltage, R:resistance
Quite simple.
On the other hand, let us back to your formula:
(motor)Voltage = MIN(((C8)+(SQRT(C8^2+4*($Voltage)*($Current*$Resistance))))/(2*$Voltage),1)*$Voltage-C8
Is it for peak current not average? Could you tell me why it is?
I know:
x = (-b +/- SQRT(b^2-4ac))/2a
is the solution of:
ax^2+bx+c=0
If you were really "hardcore" like me you have the option to replace the existing wiring inside the motor with a winding that would produce a lower Kv. It's a lot of work and I don't recommend you try, but you do have the ability to change things. However, in the process of lowering the Kv you also raise the resistance (in most cases). There is a trick where you increase the "copper fill" (using more wire than stock) and that can increase the relationship by about 20%. I've rewound about six motors this way.
PWM controllers "automatically" adjust voltage and current. When you do the math you come to realize that there is little advantage to what you are describing. The goal "should" be to identify the correct "voltage / current limit" relationship and then gear for that. PWM controllers make this idea obsolete. (not that a lot of people haven't thought of it) To really change the motor you need to get "inside" and not "outside". What you are proposing is an "outside" solution.
Unite does give great data sheets. Currie does not. And the 1.4hp Currie Neodymium was more or less a "cancelled project" so finding data is very hard.
Pages