Hall Effect throttles provide a simple signal of from 0V to 5V.
The controller simply "interprets" the voltage as the desire on the part of the rider to either increase the "duty cycle" (rate at which pulses deliver energy) or to decrease it. However, just because the rider "wants" a higher "duty cycle" by requesting more with a full throttle voltage he doesn't usually get anywhere near what he asks for.
This is how the "duty cycle" is ALLOWED for full throttle using four different "powerband profiles":
Notice that there's not a lot of difference between them.
----------------
I would design a Smartphone App so that the first thing you do is simulate the motor in it's generic unregulated form using things like Pack Voltage, Kv, No Load current and Motor Resistance. You would need to have a tachometer that measured the motor rpm and the parameters for the tach would be entered into the App. Now the user might be allowed to select from a list:
Constant Power
Constant Torque
Custom Configuration
...in the Custom Configuration selection you have some cool interactive screen where you can visually alter the powerband and then be able to save the configuration with a name.
You also incorporate a handful of analysis options where you can simulate the effects which might prevent people from doing things that are undesirable like overheating the motor.
What's really cool about this idea is that you can use a generic controller and the tachometer and the Smartphone essentially takes over the tasks that the controller usually does. You could switch "powerband profiles" in the middle of a ride and not need to directly interact with the controller.
Since Smartphones are so commonplace now you could use this in racing by having everyone run the same software. Before the race you just configure the App with whatever the racing organization deems appropriate.
Have a heavy rider?
Okay, sure, give him a "powerband profile" that helps to bring him to the same level as the other racers.
...it's the fact that software is more "adaptable" that is so appealing.
Better than "no rules". (or vague and unenforced rules)
Better than "strict, but rigid rules".
This would be "strict, but adaptable". (and lot's of fun to fiddle with)
You could validate that things are working correctly with things like WattsUp meters that would confirm (or deny) your basic assumptions about the motor. The software could set up various "tests" that would help you refine your configuration data. Kv is an easy one because you just measure the No Load speed and compare that to your Pack Voltage. The App would in effect lead you through the process of understanding what the motor is doing. (so it's giving you better understanding)
Anyway... a fun idea...
Speedict is a "good start" on the concept, but it's more focused on the measurement side. I see more of a "simulator turned App" where you model the motor inside the app and then control it with just the throttle signal. Less hardware, more software.
But I will add that for "Constant Force" racing the Speedict product can already deliver the desired capability of controlling current. It's just that without the simulator you have no idea what Force the current would actually produce, so you would have to do more trial and error to get the right value.
.
Final Thoughts About Hysteresis and the Steinmetz Equation
This is an inexpensive electrical steel product. Notice that a pound of this core material can switch up to 400 Hz (that's 24,000 Electrical RPM) and only produce 10 watts of hysteresis loss. (or less)
10 watts.
Copper losses in the Currie Neodymium motor can go as high as 1000 watts if you allow it.
Iron loss seems to be a "non-issue" for the Currie Neodymium motor in an ebike application.
(RC motors spin faster and have a higher Electrical RPM so they might notice iron loss more)
.
There is a group of racers in LA ("La La Land") that are basing their rules on a fixed 2000 Watt Power limit. As you can see above the wind resistance of these Mountain Bikes with motors (Motorized Bicycles) completely dominates above 30 mph, but I suppose on a tight Go Kart track it wouldn't matter. Raw Force numbers for a 250 lb Rider + Bike show 140 lbs of Force and around 0.5G Force as a maximum. Human powered acceleration is (realistically) about 0.05G Force or something like "One Stone" (14 lbs) of Force. The bottom line is that if you built a 2000 watt ebike properly you would never need to pedal.
If you where to make a comparison to Force type rules and wanted the bikes to be nearly equal you would probably need about 30 lbs of Force to make things equal depending on the weights involved.
The numbers were generated based on my RC motor that I might get around to running "someday", but I'm going to need a lathe to create some unusual parts with high precision and weird shapes.
------------------
I think it's interesting that when you really study where the losses are it ends up that the motor is not the first place to look. Above 30 mph your primary focus should be reducing your aerodynamic losses.
Also interesting to note is that Steinmetz calculated losses appear to be comparable to No Load linear losses, which suggests that the approximations are all making sense. A properly designed motor will usually demonstrate more copper losses than iron losses.
So hopefully the "iron loss myths" can be put to rest...
Charts are a language of their own. The goal is to visually capture the "essence" of a problem in a way that anyone can understand what is being presented. It's not always easy.
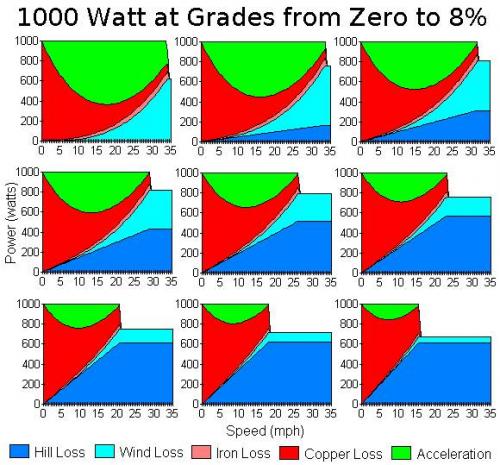
1000 Watts of Power maintains a flat shape on top because the 1000 Watts is being "forced" by the limitation. Actual power as a result is 1000 Watts of input minus whatever losses there are.
.
Now on my first attempt on my ebike I tried gearing for "One Stone" (14 lbs of Force) but there were some problems with this setup. Acceleration was very slow, so it took forever to get up to full speed and any hills that presented themselves would halt any acceleration there was.
.
My original calculation was for 20 lbs of Force because at 20 mph that translates to about one horsepower at the rear wheel. I'm going to go back to that because that looks pretty good. Will update when those tests take place.
.
If I want to extend the top end more I just add more cells to the battery. (total upgrade ~$300)
Note: I used a higher wind resistance value (0.38) on all three to make it even.
The loss will be 0.05 x (160) 1.84 x (0.1) 3 x 3.58 x 2.4 −6 = 1.36 W.
---------------
I tried searching Endless Sphere for "Steinmetz" and got nothing. They do refer to the equation in their motor theory area, but didn't bother to actually STUDY it.
This realization actually occurred to me first at the age of 16. I remember going to the school library and discovering a book about bicycle physics and I remember excitingly recording the formulas in the books so I could take them home with me to ponder them. Some 35 years later the same core realization is central to the hobby. (it's still fun)
First we look at a Mountain Bike with a fancy RC Motor all tricked out and with 2000 watts of input. This is considered the "desireable" configuration by some people. You can pop wheelies. ;)
Notice how the motors copper loss and iron loss are reduced to about 20% as the speed increases. 80% of the battery is "consumed" by the air. Before you even reach 25 mph a full HALF of your battery's energy goes to wind loss.
So we wise up a little...
We create a "road racer" style bike with full fairings and we pump more power out the top end with a Force based configuration. This now looks like this:
This looks a little different. There is more copper loss at higher speed, but we still see the wind loss dominate over the copper even with substantially more top end.
So let's backtrack to the "less efficient" Currie Neodymium motor. What does that look like?
Here again we see the same basic truth that above 25 mph (and definitely above 30 mph) the motor becomes less and less important as a source of energy consumption. It's always better to use a high efficiency motor, but don't fool yourself into thinking that's all there is to think about.
Wind loss is the dominant issue.
If one "assumes" that acceleration from 0 mph to 20 mph is done primarily through pedal power, then the relative performance of the motor compared to the wind becomes less important. Gaining higher aerodynamic advantage becomes the main focus above pedaling speeds.
.
Normally one thinks of a motor as something that provides "acceleration".
But sometimes your goal is to simply idle along at a certain speed. When you maintain a constant speed your motor input balances exactly your losses, whether they be from wind or from copper or iron.
.
At very low speeds the no load losses seem to explode in importance. The CSIRO solar racer is a good example of a machine that focused "excessively" on efficiency and they went to great lengths to reduce the small losses that disappear at higher speeds, but are significant at low speeds. Notice that as you increase speed the wind losses completely dominate even without acceleration involved. The green shaded region for "Power Result" is non-existent because we have no acceleration to exceed losses.
.
. Range starts out best at low speed and just gets worse.
Motor efficiency starts out bad at low speed and is best at full speed.
...there is no "escape" from this.
---------------
The things that reduce range the most are:
*** Acceleration (the faster you accelerate the more energy must be expended)
*** Wind losses increase rapidly with speed, but the rate of increase is defined by the "effective frontal area" which contains in it a shape coefficient that determines the rate of loss growth. Wind loss becomes the dominant loss above about 20 mph for ebikes.
*** Least critical of the losses is copper and iron losses above 20 mph. For "conventional" Power limited motors it's possible to really heat up a motor in a hurry at low speeds (often 2 to 4 times faster) but at higher speeds when motor efficiency is at it's best the copper loss becomes a small loss in relative terms.
*** In normal "racing" where speeds seldom drop below 20 mph about 50% to 80% of your battery simply pushes wind around.
Many of these solar racers use "Force Limiting" as their control scheme because they remove all the iron from their motor designs. Often Halbach configured magnets in an axial configuration are driven simply by copper alone. This can achieve 96% efficiency, but without the iron mass typical of our motors the temperature can rise very rapidly. This in a sense "forces" the "Force Limiting" control scheme because they know what is the maximum thermal limit these motors can handle.
So the entire solar racing community uses "Force" for control. (not Power)
.
"Motor efficiency starts out bad at low speed and is best at full speed.
...there is no "escape" from this."
Unless you are talking about *motor* speed, the "escape" would be to use a variable speed transmission. The lack of a transmission in most hub motors is what makes them such sluggish performers at low speeds. BTW, it seems to me that hub motors reach peak efficiency before maximum speed, not at it...
I think most hub motors tend to gear a little low compared to wind loss. They do that to discourage overheating at low speed.
In a "Force Limiting" scheme the current is constant, so you can afford to run more current at higher speeds and counter wind loss.
The "historical counter argument" I've been hearing for years is:
"If you run more current at high speeds you get more iron loss."
...but the Steinmetz equation for Iron Losses just doesn't show this as true.
That frame of mind is a "myth".
Maximum Iron Loss should not exceed 10 watts per pound of electrical steel. (iron core)
My guess is that people were assuming the cause was iron loss when the real problem was excessive current at low rpm due to "Power Limiting" control schemes. Many people still believe the "myth".
-------------
P.S: I agree 100% about multispeed gearing. My last ebike had that and it's true, you can achieve high motor efficiency everywhere you can gear for.
.
Was just reading up on the latest solar racing news...
Seems that all the teams run Halbach axial flux motors with no iron. Efficiency is around 98%.
The aerodynamic coefficient is an impressive 0.1 on the better machines. This compares to 0.5 for a regular bicycle and about 0.3 for a "road racer" like my ebike.
As a result of having such low wind loss values they started exceeding the speed limits of 68 mph (to as high as 81 mph) and so they have actually begun slowing the cars down in order to prevent injuries.
81 mph would take an enormous amount of energy with a bicycle because of wind losses, but if you are aerodynamic enough and spread your motor powerband out with Force based limiting it's being done with only about 2000 watts.
Acceleration is slow of course... so it's a little like "One Stone" racing, plenty of top speed, but a little slow to get there.
Had to do a quick simulation of Solar Racer variables. I kept no load "iron loss" in there and just cranked it down to near zero, which should cover things like friction loss. Kind of a similiar pattern, below 20 mph the wind is not enough of a factor, so copper losses (though small) still dominate.
Using 250 lbs for rider and car (way too low) I get something near "One Stone" at about 16 lbs of Force. Increase the weight (to whatever it really is) and that might go lower, though I would think being lightweight would be considered valuable.
At "One Stone" you feel just a constant acceleration... nothing "motorcycle road racer" like at all, but that's desired in my view for ebike racing because motorcycles already "own" the acceleration thrill marketplace.
Anyway... proof that you can get high top speeds with low power if the aerodynamic shape is right.
I create the charts on an old PC using an old version of Excel, but most of the time I prefer my Android Tablet for actual internet browsing. So it's actually helpful to me to post my own charts just so I can see them. (sort of cloud computing "like") If others have fun with my (longwinded) posts that's good too. ;)
Anyways...
This is how I'm looking to gear my ebike:
.
And this is how the wind loss compares to motor loss while at "full throttle" which is mostly a given:
.
.
The only time you let off the throttle is when you are forced to by a turn.
Notice the ZOOM closeup of the area from 30 mph to 35 mph. This is the "sweet spot" I'm hoping to create where you have pulled yourself up to full speed already, but the wind loss isn't all that large yet. The motor falls past it's peak power (32 mph) and it gets close to it's No Load speed and the current drops and efficiency rises. If I've done this just right my "overall" efficiency should be around 80% at that point. This means that 80% of the battery "pushes wind around" and only 20% is lost to the motor, while going 34 mph. This can only be achieved if you stay in the road racing tuck. The moment you sit up the wind loss will increase and you will drop back to peak power at 32 mph and "overall" efficiency drops to 60% wind and 40% motor.
Any hill or headwind will drop me out of the "sweet spot" and back into peak power... but at least there's two horsepower there, so I will not drop all the way back to 20 mph like with "One Stone". My "hope" is that 20 lbs of Force for 250 lbs of weight is the perfect gearing, but the only way to know is with a lot of experience with it.
Since "absolute power" is a silly goal for ebike racing (that's where motorcycles reign) the goal is really about finding this balance of speed, acceleration and aerodynamic advantage to provide a satisfying rider experience. Being forced to pedal "out of necessity" at low speeds and being forced to tuck at high speeds and needing to know when to transition between them "should" make for a complex and sophisticated set of rider skills.
Over on Endless Sphere they are playing around with an expensive RC motor. Price : $400
Great stats:
Battery: 14 Cell / 51.8V
RPM: 150kv
Max current: 190A
Watts: 9800w
No load current: 51.8V/5.2A
Internal resistance: 0.011 ohm
Weight: 2530g
Diameter of shaft: 10mm
Winding: 8T
Stator Pole: 24
Motor Pole: 20
Stator Diameter: 101
Lamination Thickness: 0.2mm
...simply incredible.
But at $400 way out of my price range for just the motor. :(
Part of the reason there are so many "old men" in this sport/hobby right now is there is no low priced entry level product that an 8 - 12 year old kid could buy at Walmart. All this attention to exotic and expensive illegal and high powered motors just feeds the desires of "old men" with money and time to burn. Now there's nothing wrong with "old men" having hobbies (that's who I am) but it would be nice if some opening were created for the children.
Just my opinion.
The day you can go to Walmart and see an ebike with plastic fairings is the day that the "sport" of ebike racing on Go Kart tracks is for real. One wonders how long it will take. 20 years? Never?
--------------
20 Motor Poles means 10 Motor Pole Pairs and at 8,000 motor rpm that's:
10 * 8,000 = 80,000 Electrical RPM
80,000 / 60 = 1333 Hz
(the Currie Neodymium motor runs at around 100 Hz)
Assuming 20 watts per pound as a maximum and 5 lbs of iron core you "should" get:
20 watts * 5 lbs = 100 watts
.
.
Going back to the stated value:
No load current: 51.8V/5.2A
...which would mean 51.8V * 5.2A = 270 Watts @ 7770 rpm
Iron loss appears to account for less than half of the No Load loss.
-----------------
By design, my Currie motor never exceeds 240 watts of heat (and maybe 100 watts of No Load loss) so the intention here with the larger motor is to scale everything up and that means No Load losses scale up with it. (the Currie motor is not high efficiency) For lower powered situations it's actually good to use a smaller motor. (less weight) This is "overkill" for an ebike of under 2000 watts. But on the other hand, the bearings are good so if you ran this motor in the middle of it's potential (say 4000 watts) it would not buckle under the load like a typical RC motor.
.
Apparently there is a motor constant that specifically classifies motors for their capabilities while eliminating all the variabilities you get with different choices in windings.
"The motor constant is winding independent (as long as the same conductive material used for wires); e.g., winding a motor with 6 turns with 2 parallel wires instead of 12 turns single wire will double the velocity constant, Kv , but Km remains unchanged. Km can be used for selecting the size of a motor to use in an application. Kv can be used for selecting the winding to use in the motor."
-----------------
So I figure what the heck, let's find out what the constant is for my Currie Neodymium motor. First I take the motor output and since:
Power = Force * Velocity
or
Power = Torque * Rotation
...I was able (with some conversion factors) to know that the motor at 40 amps produces 5 Nm of torque.
Since I pretty much know my motor losses (iron loss, copper loss) all I had to do was divide the torque by the square root of the losses and the result was:
Currie Neodymium Motor - Km 0.30
-----------------
Going to Endless Sphere "Miles" did a good job recording the constants of some big RC motors:
Turnigy RotoMax 150cc - Km 0.24
Turnigy RotoMax 100cc - Km 0.19
Turnigy RotoMax 80cc - Km 0.22
Turnigy RotoMax 50cc - Km 0.35
Turnigy G160 - Km 0.35
Turnigy C80 - Km 0.22
Astro 3210 - Km 0.20
Scorpion S-5030 - Km 0.43
...so the Currie Neodymium motor compares well to the RC motors at 40 amps.
The difference is that 40 amps is the limit you don't want to go past because you will destroy the commutator. The big RC motors have their numbers based on much higher power output. (more power, more heat, lower Km)
This reinforces the notion that the Currie Neodymium motor is like a tractor motor, large torque, heavy construction, slow moving and it's run at well below it's saturation point. Also, the Km does not make consideration for weight, the Currie motor is heavy relative to the RC motors and does not deliver the same peak power.
--------------
Did the same for the SK3 Aerodrive 6374 motor and I get Km equal to roughly 0.50. This assumes I only drive it as hard as I need to for my application. The moral seems to be to get the "right size" for the job you have in mind, not too big, not too small. Of course if you are infected with "crazy ebike power sickness" the desire for more never ceases. ;)
.
The biggest problem with electric motor modeling is capturing the motor in a variety of situations. Often people will say things like:
"My motor is 93% efficient".
...like the motor is that efficient ALL the time. (not true)
So for my charts I've added the effects of Hills (Grade in %) so that I can see how it effects performance in a more visual way.
.
.
.
...I'll get into the concept more after Xmas.
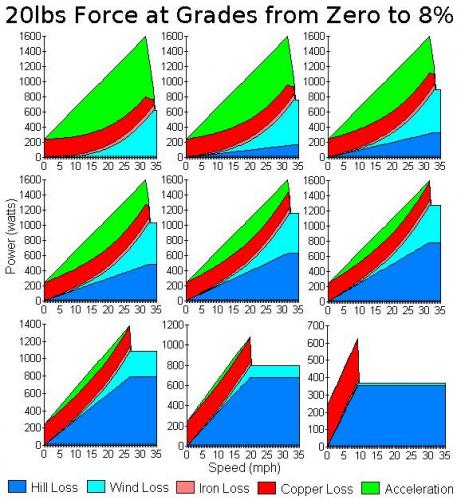
Basically what happens is the "Power Limited" ebike tends to lose speed in a linear way with increasing Grade, but the "Force Limited" ebike holds it's top speed up to a certain Grade, then falls off sharply. It's interesting. You would need a lot more power overall in the "Power Limited" approach to climb as fast.
A counter intuitive result... up to a point "Force Limiting" is much faster uphill.
Power is actually a derived value consisting of a combination of Torque and Rotation. Power can also be expressed as a combination of Force and Velocity. Changing back and forth is just a matter of conversion factors.
So is Pleasure all about Torque?
Yes and No...
The Pleasure Principle
Ultimately we come to realize that it's ACCELERATION that gives pleasure and not Power alone.
We define eBike Pleasure as:
Constant Positive Acceleration or Increasing Positive Acceleration.
We define eBike "dis" - Pleasure as:
Decreasing while still Positive Acceleration.
There is actually another area to consider which is Negative Acceleration (braking) and it also has three different modes:
Constant Negative, Increasing Negative and Decreasing Negative Acceleration.
...but that's another story.
.
Looking here at a typical 1000 Watt Mountain Bike we see how the GREEN area represents Acceleration "after losses". Losses fit into different categories like copper loss, iron loss, wind loss and hill loss. You can't really talk about the Pleasure until after you subtract all the losses because they all impact your riding experience. All these losses are specific to the motor, the gearing, the rider and bike weight so it's very hard to talk about anything in isolation.
We see in the GREEN area what is known as the "EV Grin" which is a very strong acceleration beginning at very low speeds (essentially at zero) that "fades out" after 15 mph. Riding this type of powerband gives a pleasurable experience up to 15 mph and then a great sense of disappointment afterwards. The "EV Grin" becomes the "EV Bummer".
.
.
In order to improve the Pleasure it's possible to "shift" Acceleration to a higher point in the powerband. In this example I've also adjusted for a lower Wind loss since the Road Racer concept focuses on improved aerodynamics over a Mountain Bike.
.
.
This extracts only the Acceleration of the two eBikes and shows how the 1000 Watt Mountain Bike "peaks early" and then fades away. For the 20 lbs of Force Road Racer the power comes on slower, but lasts longer which tends to extend the Pleasure.
Which is actually faster?
The truth is that they are probably very similiar. Long ago (2006) when I first started into this hobby it was all about going faster. But it wasn't long before it became clear that it doesn't take much to make something that is absurd... a poorly designed "motorcycle with pedals".
So my goal now is Pleasure... if the "Pleasure Principle" were to expand into actual racetrack action that's great, but for now I'm content that it's something I can enjoy.
.
The Road Racer can pull a higher top speed due to reduced wind resistance.
The Mountain Bike uses the most energy (least Range) because at full throttle and low speed the motor efficiency is poor. (a lower gearing would work better)
The Road Racer (if geared correctly) has a "sweet spot" at top speed because you are approaching the No Load motor speed which has a reduced current. Acceleration is mild here, but motor efficiency is good as long as Iron Loss (remember the Steinmetz Equation) is not a conflicting factor.
The first thing people do when they want to increase motor power is to increase the voltage of their battery. This "overvolting" causes the motor to spin faster and since from the Steinmetz Equation we know that switching frequency causes the No Load current (iron losses) to increase we end up adding more heat.
So we cut back on motor current to reduce copper losses and gear the ebike lower to be able to handle all this extra motor rpm.
...in the end we have basically traded copper losses for iron losses !!!
You can always find ways to push motors to do things they don't like to do, but ultimately a motor has a "preferred performance level" that it wants to run in. If you run a sprint you can risk higher performance, but if you run a marathon you pace yourself.
I do own this motor... the Aerodrive SK3 6374. However, in it's stock form it's basically unusable for an ebike application because the bearings are too weak. So I am "trying" to reinvent the motor with new bearings, but it will take a long time and may never be successful. I have no machine shop to create high precision parts, so my ability to pull off certain things is limited. But I will try.
What is interesting is that since Force is the same (20 lbs) between the brushed and brushless motors in these configurations the ONLY thing I'm changing is the efficiency and the only result is a slight improvement in range. It's a lot of work for very litte real world benefit.
But brushless is better than brushed... it would increase range by about 5 miles.
I can also extend the top end a few mph (35 to 40 mph) and that helps.
.
If you were going 20 mph up a 5% grade you would consume 2 watts per pound. So if you and your bike weighed 250 lbs you would need 2 * 250 = 500 watts to climb.
Using the same math at 40 mph and it's 4 * 250 = 1000 watts.
Switching to the Aerodynamic chart...
If you have a mountain bike your effective frontal area (drag coefficient) is roughly 0.5 and so at 30 mph you would need about 700 watts to overcome the wind.
With a road racer style bike your number is closer to 0.3 and so at 30 mph you would need about 400 watts.
So you save more power (700 - 400 = 300 watts) by staying behind a fairing and doing "nothing" than if you were standing up and pedaling. This is the "core realization" that launched all the recumbents, the aerodynamic drag is a much bigger factor than anything else above 20 mph. By 30 mph it's all about the wind.
.
The next state I'm looking to move to has a "motorized bicycle" law that makes 30 mph perfectly legal.
It really comes down to how many teeth I choose for the front sprocket because I have to custom machine it myself. With a 100 tooth rear sprocket I have many choices if I want to gear it up (make the rear smaller) but I also can increase voltage.
At present my 24 tooth front sprocket is way too high.
This will make the ebike totally "street legal". :)
.
Not the most efficient of setups (good thing you don't need those resistors!!!), but a good quick-and-dirty solution when no other electrical power is available.
My rides:
2017 Zero S ZF6.5 11kW, erider Thunder 5kW
People tend to overrate the difficulty of charging.
Basically all you really need is a constant voltage supply and have the willingness to watch what is happening.
The "clue" that the battery is filled is that after sagging a little the voltage comes back up pretty fast. When you see the "knee" in the voltage you know it's time to finish.
It helps to have separate wiring harnesses for charging and runtime. Runtime is 12S (40 volts) and charging is 3S (10 volts).
There's one more "crazy idea" that I want to try and that is "full parallel" and 220VAC power converting through a homemade transformer that delivers 1S (4 volts) at something like 600 amps. You could then fast charge without any worry about balancing. (since parallel cells automatically balance). Each cell would get it's own 10AWG set of wires. (so 12 times 10AWG @ 50 amps each is 600 amps)
...this is assuming the A123 cells will charge at 3C which is unclear. The cells tend to "like" to absorb at a rate that seems to reflect the internal processes of the chemistry. This rate may or may not work. It's also likely that this much power while fast charging will cause the cells to degrade faster.
----------
The car-to-ebike concept seems to be a success already... so that's done. :)
I will be trying the ebike rack by taking a 200 mile trip in the next couple days.
Sure hope it doesn't break. :(
It seems rigid now after adding a lot of extra bracing, but you never know how something like this will handle the bumps on the freeway. The idea of six years of work breaking off the back of the car and bouncing on the ground is a little scary.
Fingers crossed...
(the entire rack is attached with four bolts... standard towing rack location)


The Smartphone App
Hall Effect throttles provide a simple signal of from 0V to 5V.
The controller simply "interprets" the voltage as the desire on the part of the rider to either increase the "duty cycle" (rate at which pulses deliver energy) or to decrease it. However, just because the rider "wants" a higher "duty cycle" by requesting more with a full throttle voltage he doesn't usually get anywhere near what he asks for.
This is how the "duty cycle" is ALLOWED for full throttle using four different "powerband profiles":
Notice that there's not a lot of difference between them.
----------------
I would design a Smartphone App so that the first thing you do is simulate the motor in it's generic unregulated form using things like Pack Voltage, Kv, No Load current and Motor Resistance. You would need to have a tachometer that measured the motor rpm and the parameters for the tach would be entered into the App. Now the user might be allowed to select from a list:
Constant Power
Constant Torque
Custom Configuration
...in the Custom Configuration selection you have some cool interactive screen where you can visually alter the powerband and then be able to save the configuration with a name.
You also incorporate a handful of analysis options where you can simulate the effects which might prevent people from doing things that are undesirable like overheating the motor.
What's really cool about this idea is that you can use a generic controller and the tachometer and the Smartphone essentially takes over the tasks that the controller usually does. You could switch "powerband profiles" in the middle of a ride and not need to directly interact with the controller.
Since Smartphones are so commonplace now you could use this in racing by having everyone run the same software. Before the race you just configure the App with whatever the racing organization deems appropriate.
Have a heavy rider?
Okay, sure, give him a "powerband profile" that helps to bring him to the same level as the other racers.
...it's the fact that software is more "adaptable" that is so appealing.
Better than "no rules". (or vague and unenforced rules)
Better than "strict, but rigid rules".
This would be "strict, but adaptable". (and lot's of fun to fiddle with)
You could validate that things are working correctly with things like WattsUp meters that would confirm (or deny) your basic assumptions about the motor. The software could set up various "tests" that would help you refine your configuration data. Kv is an easy one because you just measure the No Load speed and compare that to your Pack Voltage. The App would in effect lead you through the process of understanding what the motor is doing. (so it's giving you better understanding)
Anyway... a fun idea...
Speedict is a "good start" on the concept, but it's more focused on the measurement side. I see more of a "simulator turned App" where you model the motor inside the app and then control it with just the throttle signal. Less hardware, more software.
But I will add that for "Constant Force" racing the Speedict product can already deliver the desired capability of controlling current. It's just that without the simulator you have no idea what Force the current would actually produce, so you would have to do more trial and error to get the right value.
.
Final Thoughts About Hysteresis and the Steinmetz Equation
This is an inexpensive electrical steel product. Notice that a pound of this core material can switch up to 400 Hz (that's 24,000 Electrical RPM) and only produce 10 watts of hysteresis loss. (or less)
10 watts.
Copper losses in the Currie Neodymium motor can go as high as 1000 watts if you allow it.
Iron loss seems to be a "non-issue" for the Currie Neodymium motor in an ebike application.
(RC motors spin faster and have a higher Electrical RPM so they might notice iron loss more)
.
.
There is a group of racers in LA ("La La Land") that are basing their rules on a fixed 2000 Watt Power limit. As you can see above the wind resistance of these Mountain Bikes with motors (Motorized Bicycles) completely dominates above 30 mph, but I suppose on a tight Go Kart track it wouldn't matter. Raw Force numbers for a 250 lb Rider + Bike show 140 lbs of Force and around 0.5G Force as a maximum. Human powered acceleration is (realistically) about 0.05G Force or something like "One Stone" (14 lbs) of Force. The bottom line is that if you built a 2000 watt ebike properly you would never need to pedal.
If you where to make a comparison to Force type rules and wanted the bikes to be nearly equal you would probably need about 30 lbs of Force to make things equal depending on the weights involved.
The numbers were generated based on my RC motor that I might get around to running "someday", but I'm going to need a lathe to create some unusual parts with high precision and weird shapes.
------------------
I think it's interesting that when you really study where the losses are it ends up that the motor is not the first place to look. Above 30 mph your primary focus should be reducing your aerodynamic losses.
Also interesting to note is that Steinmetz calculated losses appear to be comparable to No Load linear losses, which suggests that the approximations are all making sense. A properly designed motor will usually demonstrate more copper losses than iron losses.
So hopefully the "iron loss myths" can be put to rest...
.
Chart Optimization
Charts are a language of their own. The goal is to visually capture the "essence" of a problem in a way that anyone can understand what is being presented. It's not always easy.
1000 Watts of Power maintains a flat shape on top because the 1000 Watts is being "forced" by the limitation. Actual power as a result is 1000 Watts of input minus whatever losses there are.
.
Now on my first attempt on my ebike I tried gearing for "One Stone" (14 lbs of Force) but there were some problems with this setup. Acceleration was very slow, so it took forever to get up to full speed and any hills that presented themselves would halt any acceleration there was.
.
My original calculation was for 20 lbs of Force because at 20 mph that translates to about one horsepower at the rear wheel. I'm going to go back to that because that looks pretty good. Will update when those tests take place.
.
If I want to extend the top end more I just add more cells to the battery. (total upgrade ~$300)
Note: I used a higher wind resistance value (0.38) on all three to make it even.
.
The Steinmetz Equation:
...does a pretty good job of estimating iron loss.
http://www.digikey.com/us/en/techzone/lighting/resources/articles/buck-converters-for-ssl-applications.html
Example:
At a duty cycle of 50%
Kh = 0.05
f = 80 (kHz)
α = 1.8
B max = 100 mT
β = 3
V core = 2.4 cm3 ,
The loss will be 0.05 x (160) 1.84 x (0.1) 3 x 3.58 x 2.4 −6 = 1.36 W.
---------------
I tried searching Endless Sphere for "Steinmetz" and got nothing. They do refer to the equation in their motor theory area, but didn't bother to actually STUDY it.
Geez...
.
The Domination of Wind Loss
This realization actually occurred to me first at the age of 16. I remember going to the school library and discovering a book about bicycle physics and I remember excitingly recording the formulas in the books so I could take them home with me to ponder them. Some 35 years later the same core realization is central to the hobby. (it's still fun)
First we look at a Mountain Bike with a fancy RC Motor all tricked out and with 2000 watts of input. This is considered the "desireable" configuration by some people. You can pop wheelies. ;)
Notice how the motors copper loss and iron loss are reduced to about 20% as the speed increases. 80% of the battery is "consumed" by the air. Before you even reach 25 mph a full HALF of your battery's energy goes to wind loss.
So we wise up a little...
We create a "road racer" style bike with full fairings and we pump more power out the top end with a Force based configuration. This now looks like this:
This looks a little different. There is more copper loss at higher speed, but we still see the wind loss dominate over the copper even with substantially more top end.
So let's backtrack to the "less efficient" Currie Neodymium motor. What does that look like?
Here again we see the same basic truth that above 25 mph (and definitely above 30 mph) the motor becomes less and less important as a source of energy consumption. It's always better to use a high efficiency motor, but don't fool yourself into thinking that's all there is to think about.
Wind loss is the dominant issue.
If one "assumes" that acceleration from 0 mph to 20 mph is done primarily through pedal power, then the relative performance of the motor compared to the wind becomes less important. Gaining higher aerodynamic advantage becomes the main focus above pedaling speeds.
.
Acceleration of Zero G
Normally one thinks of a motor as something that provides "acceleration".
But sometimes your goal is to simply idle along at a certain speed. When you maintain a constant speed your motor input balances exactly your losses, whether they be from wind or from copper or iron.
.
At very low speeds the no load losses seem to explode in importance. The CSIRO solar racer is a good example of a machine that focused "excessively" on efficiency and they went to great lengths to reduce the small losses that disappear at higher speeds, but are significant at low speeds. Notice that as you increase speed the wind losses completely dominate even without acceleration involved. The green shaded region for "Power Result" is non-existent because we have no acceleration to exceed losses.
.
.
Range starts out best at low speed and just gets worse.
Motor efficiency starts out bad at low speed and is best at full speed.
...there is no "escape" from this.
---------------
The things that reduce range the most are:
*** Acceleration (the faster you accelerate the more energy must be expended)
*** Wind losses increase rapidly with speed, but the rate of increase is defined by the "effective frontal area" which contains in it a shape coefficient that determines the rate of loss growth. Wind loss becomes the dominant loss above about 20 mph for ebikes.
*** Least critical of the losses is copper and iron losses above 20 mph. For "conventional" Power limited motors it's possible to really heat up a motor in a hurry at low speeds (often 2 to 4 times faster) but at higher speeds when motor efficiency is at it's best the copper loss becomes a small loss in relative terms.
*** In normal "racing" where speeds seldom drop below 20 mph about 50% to 80% of your battery simply pushes wind around.
Many of these solar racers use "Force Limiting" as their control scheme because they remove all the iron from their motor designs. Often Halbach configured magnets in an axial configuration are driven simply by copper alone. This can achieve 96% efficiency, but without the iron mass typical of our motors the temperature can rise very rapidly. This in a sense "forces" the "Force Limiting" control scheme because they know what is the maximum thermal limit these motors can handle.
So the entire solar racing community uses "Force" for control. (not Power)
.
"Motor efficiency starts out bad at low speed and is best at full speed.
...there is no "escape" from this."
Unless you are talking about *motor* speed, the "escape" would be to use a variable speed transmission. The lack of a transmission in most hub motors is what makes them such sluggish performers at low speeds. BTW, it seems to me that hub motors reach peak efficiency before maximum speed, not at it...
I think most hub motors tend to gear a little low compared to wind loss. They do that to discourage overheating at low speed.
In a "Force Limiting" scheme the current is constant, so you can afford to run more current at higher speeds and counter wind loss.
The "historical counter argument" I've been hearing for years is:
"If you run more current at high speeds you get more iron loss."
...but the Steinmetz equation for Iron Losses just doesn't show this as true.
That frame of mind is a "myth".
Maximum Iron Loss should not exceed 10 watts per pound of electrical steel. (iron core)
My guess is that people were assuming the cause was iron loss when the real problem was excessive current at low rpm due to "Power Limiting" control schemes. Many people still believe the "myth".
-------------
P.S: I agree 100% about multispeed gearing. My last ebike had that and it's true, you can achieve high motor efficiency everywhere you can gear for.
.
Solar Racers Are Impressive
Was just reading up on the latest solar racing news...
Seems that all the teams run Halbach axial flux motors with no iron. Efficiency is around 98%.
The aerodynamic coefficient is an impressive 0.1 on the better machines. This compares to 0.5 for a regular bicycle and about 0.3 for a "road racer" like my ebike.
As a result of having such low wind loss values they started exceeding the speed limits of 68 mph (to as high as 81 mph) and so they have actually begun slowing the cars down in order to prevent injuries.
81 mph would take an enormous amount of energy with a bicycle because of wind losses, but if you are aerodynamic enough and spread your motor powerband out with Force based limiting it's being done with only about 2000 watts.
Acceleration is slow of course... so it's a little like "One Stone" racing, plenty of top speed, but a little slow to get there.
.
Had to do a quick simulation of Solar Racer variables. I kept no load "iron loss" in there and just cranked it down to near zero, which should cover things like friction loss. Kind of a similiar pattern, below 20 mph the wind is not enough of a factor, so copper losses (though small) still dominate.
Using 250 lbs for rider and car (way too low) I get something near "One Stone" at about 16 lbs of Force. Increase the weight (to whatever it really is) and that might go lower, though I would think being lightweight would be considered valuable.
At "One Stone" you feel just a constant acceleration... nothing "motorcycle road racer" like at all, but that's desired in my view for ebike racing because motorcycles already "own" the acceleration thrill marketplace.
Anyway... proof that you can get high top speeds with low power if the aerodynamic shape is right.
Solar racer math "works" as claimed...
.
Final Gearing Choice
I create the charts on an old PC using an old version of Excel, but most of the time I prefer my Android Tablet for actual internet browsing. So it's actually helpful to me to post my own charts just so I can see them. (sort of cloud computing "like") If others have fun with my (longwinded) posts that's good too. ;)
Anyways...
This is how I'm looking to gear my ebike:
.
And this is how the wind loss compares to motor loss while at "full throttle" which is mostly a given:
.
.
The only time you let off the throttle is when you are forced to by a turn.
Notice the ZOOM closeup of the area from 30 mph to 35 mph. This is the "sweet spot" I'm hoping to create where you have pulled yourself up to full speed already, but the wind loss isn't all that large yet. The motor falls past it's peak power (32 mph) and it gets close to it's No Load speed and the current drops and efficiency rises. If I've done this just right my "overall" efficiency should be around 80% at that point. This means that 80% of the battery "pushes wind around" and only 20% is lost to the motor, while going 34 mph. This can only be achieved if you stay in the road racing tuck. The moment you sit up the wind loss will increase and you will drop back to peak power at 32 mph and "overall" efficiency drops to 60% wind and 40% motor.
Any hill or headwind will drop me out of the "sweet spot" and back into peak power... but at least there's two horsepower there, so I will not drop all the way back to 20 mph like with "One Stone". My "hope" is that 20 lbs of Force for 250 lbs of weight is the perfect gearing, but the only way to know is with a lot of experience with it.
Since "absolute power" is a silly goal for ebike racing (that's where motorcycles reign) the goal is really about finding this balance of speed, acceleration and aerodynamic advantage to provide a satisfying rider experience. Being forced to pedal "out of necessity" at low speeds and being forced to tuck at high speeds and needing to know when to transition between them "should" make for a complex and sophisticated set of rider skills.
Should be fun... will update as needed...
.
http://www.hobbyking.com/hobbyking/store/__25413__Turnigy_RotoMax_150cc_Size_Brushless_Outrunner_Motor.html
Over on Endless Sphere they are playing around with an expensive RC motor. Price : $400
Great stats:
Battery: 14 Cell / 51.8V
RPM: 150kv
Max current: 190A
Watts: 9800w
No load current: 51.8V/5.2A
Internal resistance: 0.011 ohm
Weight: 2530g
Diameter of shaft: 10mm
Winding: 8T
Stator Pole: 24
Motor Pole: 20
Stator Diameter: 101
Lamination Thickness: 0.2mm
...simply incredible.
But at $400 way out of my price range for just the motor. :(
Part of the reason there are so many "old men" in this sport/hobby right now is there is no low priced entry level product that an 8 - 12 year old kid could buy at Walmart. All this attention to exotic and expensive illegal and high powered motors just feeds the desires of "old men" with money and time to burn. Now there's nothing wrong with "old men" having hobbies (that's who I am) but it would be nice if some opening were created for the children.
Just my opinion.
The day you can go to Walmart and see an ebike with plastic fairings is the day that the "sport" of ebike racing on Go Kart tracks is for real. One wonders how long it will take. 20 years? Never?
--------------
20 Motor Poles means 10 Motor Pole Pairs and at 8,000 motor rpm that's:
10 * 8,000 = 80,000 Electrical RPM
80,000 / 60 = 1333 Hz
(the Currie Neodymium motor runs at around 100 Hz)
Assuming 20 watts per pound as a maximum and 5 lbs of iron core you "should" get:
20 watts * 5 lbs = 100 watts

.
.
Going back to the stated value:
No load current: 51.8V/5.2A
...which would mean 51.8V * 5.2A = 270 Watts @ 7770 rpm
Iron loss appears to account for less than half of the No Load loss.
-----------------
By design, my Currie motor never exceeds 240 watts of heat (and maybe 100 watts of No Load loss) so the intention here with the larger motor is to scale everything up and that means No Load losses scale up with it. (the Currie motor is not high efficiency) For lower powered situations it's actually good to use a smaller motor. (less weight) This is "overkill" for an ebike of under 2000 watts. But on the other hand, the bearings are good so if you ran this motor in the middle of it's potential (say 4000 watts) it would not buckle under the load like a typical RC motor.
.
How Big is Too Big?
That's a good question.
Apparently there is a motor constant that specifically classifies motors for their capabilities while eliminating all the variabilities you get with different choices in windings.
http://en.m.wikipedia.org/wiki/Motor_constants
"The motor constant is winding independent (as long as the same conductive material used for wires); e.g., winding a motor with 6 turns with 2 parallel wires instead of 12 turns single wire will double the velocity constant, Kv , but Km remains unchanged. Km can be used for selecting the size of a motor to use in an application. Kv can be used for selecting the winding to use in the motor."
-----------------
So I figure what the heck, let's find out what the constant is for my Currie Neodymium motor. First I take the motor output and since:
Power = Force * Velocity
or
Power = Torque * Rotation
...I was able (with some conversion factors) to know that the motor at 40 amps produces 5 Nm of torque.
Since I pretty much know my motor losses (iron loss, copper loss) all I had to do was divide the torque by the square root of the losses and the result was:
Currie Neodymium Motor - Km 0.30
-----------------
Going to Endless Sphere "Miles" did a good job recording the constants of some big RC motors:
Turnigy RotoMax 150cc - Km 0.24
Turnigy RotoMax 100cc - Km 0.19
Turnigy RotoMax 80cc - Km 0.22
Turnigy RotoMax 50cc - Km 0.35
Turnigy G160 - Km 0.35
Turnigy C80 - Km 0.22
Astro 3210 - Km 0.20
Scorpion S-5030 - Km 0.43
...so the Currie Neodymium motor compares well to the RC motors at 40 amps.
The difference is that 40 amps is the limit you don't want to go past because you will destroy the commutator. The big RC motors have their numbers based on much higher power output. (more power, more heat, lower Km)
This reinforces the notion that the Currie Neodymium motor is like a tractor motor, large torque, heavy construction, slow moving and it's run at well below it's saturation point. Also, the Km does not make consideration for weight, the Currie motor is heavy relative to the RC motors and does not deliver the same peak power.
--------------
Did the same for the SK3 Aerodrive 6374 motor and I get Km equal to roughly 0.50. This assumes I only drive it as hard as I need to for my application. The moral seems to be to get the "right size" for the job you have in mind, not too big, not too small. Of course if you are infected with "crazy ebike power sickness" the desire for more never ceases. ;)
.
Motor Powerband Like A Movie
The biggest problem with electric motor modeling is capturing the motor in a variety of situations. Often people will say things like:
"My motor is 93% efficient".
...like the motor is that efficient ALL the time. (not true)
So for my charts I've added the effects of Hills (Grade in %) so that I can see how it effects performance in a more visual way.
.
.
.
...I'll get into the concept more after Xmas.
Basically what happens is the "Power Limited" ebike tends to lose speed in a linear way with increasing Grade, but the "Force Limited" ebike holds it's top speed up to a certain Grade, then falls off sharply. It's interesting. You would need a lot more power overall in the "Power Limited" approach to climb as fast.
A counter intuitive result... up to a point "Force Limiting" is much faster uphill.
(depends on gearing of course)
.
Sometimes you have to suffer for a cause if you believe it is the right thing.
Thanks. (Merry Xmas)
.
Let me backtrack a little...
What Creates eBike Pleasure?
Power?
What is Power?
Power is actually a derived value consisting of a combination of Torque and Rotation. Power can also be expressed as a combination of Force and Velocity. Changing back and forth is just a matter of conversion factors.
So is Pleasure all about Torque?
Yes and No...
The Pleasure Principle
Ultimately we come to realize that it's ACCELERATION that gives pleasure and not Power alone.
We define eBike Pleasure as:
Constant Positive Acceleration or Increasing Positive Acceleration.
We define eBike "dis" - Pleasure as:
Decreasing while still Positive Acceleration.
There is actually another area to consider which is Negative Acceleration (braking) and it also has three different modes:
Constant Negative, Increasing Negative and Decreasing Negative Acceleration.
...but that's another story.
.
Looking here at a typical 1000 Watt Mountain Bike we see how the GREEN area represents Acceleration "after losses". Losses fit into different categories like copper loss, iron loss, wind loss and hill loss. You can't really talk about the Pleasure until after you subtract all the losses because they all impact your riding experience. All these losses are specific to the motor, the gearing, the rider and bike weight so it's very hard to talk about anything in isolation.
We see in the GREEN area what is known as the "EV Grin" which is a very strong acceleration beginning at very low speeds (essentially at zero) that "fades out" after 15 mph. Riding this type of powerband gives a pleasurable experience up to 15 mph and then a great sense of disappointment afterwards. The "EV Grin" becomes the "EV Bummer".


.
.
In order to improve the Pleasure it's possible to "shift" Acceleration to a higher point in the powerband. In this example I've also adjusted for a lower Wind loss since the Road Racer concept focuses on improved aerodynamics over a Mountain Bike.
.
.
This extracts only the Acceleration of the two eBikes and shows how the 1000 Watt Mountain Bike "peaks early" and then fades away. For the 20 lbs of Force Road Racer the power comes on slower, but lasts longer which tends to extend the Pleasure.
Which is actually faster?
The truth is that they are probably very similiar. Long ago (2006) when I first started into this hobby it was all about going faster. But it wasn't long before it became clear that it doesn't take much to make something that is absurd... a poorly designed "motorcycle with pedals".
So my goal now is Pleasure... if the "Pleasure Principle" were to expand into actual racetrack action that's great, but for now I'm content that it's something I can enjoy.
My "Road Racer" is fun. :)
.
A Comparison of Range
.
The Road Racer can pull a higher top speed due to reduced wind resistance.
The Mountain Bike uses the most energy (least Range) because at full throttle and low speed the motor efficiency is poor. (a lower gearing would work better)
The Road Racer (if geared correctly) has a "sweet spot" at top speed because you are approaching the No Load motor speed which has a reduced current. Acceleration is mild here, but motor efficiency is good as long as Iron Loss (remember the Steinmetz Equation) is not a conflicting factor.
.
The Price of Overvolting
.
Notice how Iron Loss has increased...
The first thing people do when they want to increase motor power is to increase the voltage of their battery. This "overvolting" causes the motor to spin faster and since from the Steinmetz Equation we know that switching frequency causes the No Load current (iron losses) to increase we end up adding more heat.
So we cut back on motor current to reduce copper losses and gear the ebike lower to be able to handle all this extra motor rpm.
...in the end we have basically traded copper losses for iron losses !!!
You can always find ways to push motors to do things they don't like to do, but ultimately a motor has a "preferred performance level" that it wants to run in. If you run a sprint you can risk higher performance, but if you run a marathon you pace yourself.
.
The "Perfect World" Scenario
I do own this motor... the Aerodrive SK3 6374. However, in it's stock form it's basically unusable for an ebike application because the bearings are too weak. So I am "trying" to reinvent the motor with new bearings, but it will take a long time and may never be successful. I have no machine shop to create high precision parts, so my ability to pull off certain things is limited. But I will try.
What is interesting is that since Force is the same (20 lbs) between the brushed and brushless motors in these configurations the ONLY thing I'm changing is the efficiency and the only result is a slight improvement in range. It's a lot of work for very litte real world benefit.
But brushless is better than brushed... it would increase range by about 5 miles.
I can also extend the top end a few mph (35 to 40 mph) and that helps.
.
These are fairly generic, but worth looking at...
If you were going 20 mph up a 5% grade you would consume 2 watts per pound. So if you and your bike weighed 250 lbs you would need 2 * 250 = 500 watts to climb.
Using the same math at 40 mph and it's 4 * 250 = 1000 watts.
Switching to the Aerodynamic chart...
If you have a mountain bike your effective frontal area (drag coefficient) is roughly 0.5 and so at 30 mph you would need about 700 watts to overcome the wind.
With a road racer style bike your number is closer to 0.3 and so at 30 mph you would need about 400 watts.
So you save more power (700 - 400 = 300 watts) by staying behind a fairing and doing "nothing" than if you were standing up and pedaling. This is the "core realization" that launched all the recumbents, the aerodynamic drag is a much bigger factor than anything else above 20 mph. By 30 mph it's all about the wind.
.
The next state I'm looking to move to has a "motorized bicycle" law that makes 30 mph perfectly legal.
It really comes down to how many teeth I choose for the front sprocket because I have to custom machine it myself. With a 100 tooth rear sprocket I have many choices if I want to gear it up (make the rear smaller) but I also can increase voltage.
At present my 24 tooth front sprocket is way too high.
This will make the ebike totally "street legal". :)
.
After three days of welding, cutting and grinding I finally got the new 16 tooth sprocket on the ebike.
The results seem to be as expected, I can climb hills and sustain about 28 mph in most places.
So it's "legal" for the place I'm going to...
.
At this point the ebike is going well. One of these days I'm going to have to build a new thread that just covers the ebike.
The "Force" concept is great. You still get good top speed, but off the line you need to pedal to get up to speed and that's a good thing.
Anyway...
Was fiddling with a car-to-ebike charging concept and I had planned to use these resistors to slow the current down:
...but I'm finding for 3S A123 charging the natural SLA car battery voltage sag achieves all I need.
Basically you just use "jumper cables" and when the car battery is "sagged" you hit the cars gas pedal to increase the alternators output.
I tried it today and it worked. I could use bigger cables because 10 AWG get hot.
Charging becomes whatever output your alternator can sustain.
When it's done the car battery is low... but not by much... far less than I expected.
.
Not the most efficient of setups (good thing you don't need those resistors!!!), but a good quick-and-dirty solution when no other electrical power is available.
My rides:
2017 Zero S ZF6.5 11kW, erider Thunder 5kW
People tend to overrate the difficulty of charging.
Basically all you really need is a constant voltage supply and have the willingness to watch what is happening.
The "clue" that the battery is filled is that after sagging a little the voltage comes back up pretty fast. When you see the "knee" in the voltage you know it's time to finish.
It helps to have separate wiring harnesses for charging and runtime. Runtime is 12S (40 volts) and charging is 3S (10 volts).
There's one more "crazy idea" that I want to try and that is "full parallel" and 220VAC power converting through a homemade transformer that delivers 1S (4 volts) at something like 600 amps. You could then fast charge without any worry about balancing. (since parallel cells automatically balance). Each cell would get it's own 10AWG set of wires. (so 12 times 10AWG @ 50 amps each is 600 amps)
A123 20ah * 12 = ~200 ah charging at 600 amps = ~3C charge rate @ ~2400 Watts
Full charge in ~200 ah * 4 volts = 800 wh, 800 wh / 2400 Watts = 20 minutes. (with complete balance)
...this is assuming the A123 cells will charge at 3C which is unclear. The cells tend to "like" to absorb at a rate that seems to reflect the internal processes of the chemistry. This rate may or may not work. It's also likely that this much power while fast charging will cause the cells to degrade faster.
----------
The car-to-ebike concept seems to be a success already... so that's done. :)
.
I'm running 40 amps right now (23 lbs of Force) but plan to increase to 43 amps to get an even 25 lbs of Force.
Because of the low gearing you spend a lot of time in the high efficiency region around 28-29 mph.
The ideal setting for highest efficiency is 25 amps. (14 lbs or "One Stone")
.
...getting close to done on the bike rack.
.
I will be trying the ebike rack by taking a 200 mile trip in the next couple days.
Sure hope it doesn't break. :(
It seems rigid now after adding a lot of extra bracing, but you never know how something like this will handle the bumps on the freeway. The idea of six years of work breaking off the back of the car and bouncing on the ground is a little scary.
Fingers crossed...
(the entire rack is attached with four bolts... standard towing rack location)
.
...finally got leaned over enough to wear in the sides of the tire.
.
Pages